NVIDIA researchers will be among the world’s best brains behind bots who are coming together for the 2022 IEEE International Conference on Robotics and Automation to share revolutionary ideas on the future of robotics and automation.
They’ll present over a dozen groundbreaking research papers, exclusive talks, and interactive workshops on topics that are shaping robotics research and development. Plus, they’ll cover how NVIDIA GPUs and AI are powering the biggest advancements in autonomous machines.
Each year since its inception nearly four decades ago, ICRA draws together thousands of the top researchers and industry-leading companies from across the globe. This year’s conference runs May 23-27 at the Pennsylvania Convention Center in Philadelphia.
Below is a sampling of the NVIDIA Robotics Research Lab’s papers that will be presented at the conference.
Autonomous Vehicle Navigation and Sim2Real
Safe and efficient autonomous vehicle and robot navigation requires accurate localization, predicting the future motion of traffic agents and stable control.
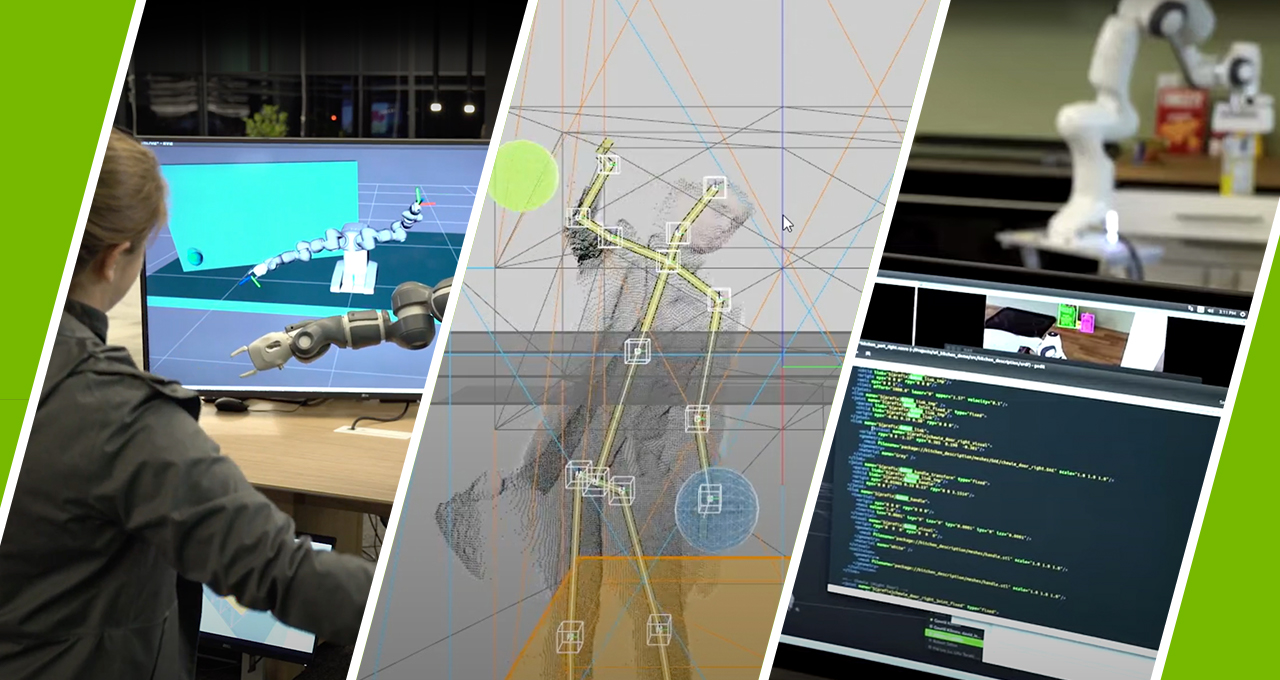
Sim2Real is the concept of transferring robot skills learned in simulation to real robotic systems and environments.
Researchers have developed novel AI methods for autonomous vehicle navigation and Sim2Real — using GPU-accelerated computing and NVIDIA Isaac Sim, an NVIDIA Omniverse-powered scalable robotics simulation application and synthetic data generation tool that supercharges photorealistic, physically accurate virtual environments for robot development.
Learn more about AV navigation, Sim2Real and pose estimation in the following papers to be presented at ICRA:
- Fusing Convolutional Neural Network and Geometric Constraint for Image-Based Indoor Localization
- Probabilistic Inference of Simulation Parameters via Parallel Differentiable Simulation
- PredictionNet: Real-Time Joint Probabilistic Traffic Prediction for Planning, Control and Simulation
Deformable, Non-Deformable and Language-Based Robot Manipulation
Robot manipulation systems have been intensively studied over the past decade.
Assistive robots operating in warehouses, offices and homes, for example, would greatly benefit from the ability to recognize and rearrange objects into meaningful arrangements — such as circles or table settings — a task that has previously been impossible for them.
In addition, enabling robots to reliably manipulate the shape of 3D deformable objects — items that are capable of changing shape, like sponges, mops or bedding — would boost applications in many industries, from home care to warehouse fulfillment to surgical assistance.
Learn more about these concepts in the following papers:
- OSCAR:Data-Driven Operational Space Control for Adaptative and Robust Robot Manipulation
- Geometric Fabrics: Generalizing Classical Mechanics to Capture the Physics of Behavior
- StructFormer: Learning Spatial Structure for Language-Guided Semantic Rearrangement of Novel Objects
- PlaTe: Visually-Grounded Planning With Transformers in Procedural Tasks
- Long-Horizon Manipulation of Unknown Objects via Task and Motion Planning With Estimated Affordances
- Bayesian Optimisation for Robust Model Predictive Control Under Model Parameter Uncertainty
- Learning Visual Shape Control of Novel 3D Deformable Objects From Partial-View Point Clouds
Human-Robot Handovers and Simulation
Getting robots to generate smooth motions when taking an object from a human — in a way that takes human comfort into account — remains a challenge, but is fundamental to human-robot collaboration.
Through a novel model-predictive control framework, NVIDIA researchers were able to bridge the gap between grasp selection and motion planning by a large margin.
In addition, NVIDIA Research team members developed a new simulation benchmark, HandoverSim, enabling the robotics community to standardize and reproduce evaluation of receiver policies.
Read more about this work in the following papers:
- Model Predictive Control for Fluid Human-to-Robot Handovers
- HandoverSim: A Simulation Framework and Benchmark for Human-to-Robot Object Handovers
Connect With Robotics Team Experts
Several members of the NVIDIA robotics team will present at ICRA.
A workshop on “Releasing Robots into the Wild: Simulations, Benchmarks and Deployment” will highlight:
- NVIDIA Isaac Sim: A Platform for Developing and Training Smarter Robots featuring Liila Torabi, senior product manager for Isaac Sim at NVIDIA.
- Simulation and Sim-to-Real for Quadruped Robot Locomotion featuring Erwin Coumans, distinguished engineer for Omniverse and simulation technology at NVIDIA.
- Paving the Path to Robot Autonomy With Simulation featuring Animesh Garg, senior research scientist for robotics reinforcement learning at NVIDIA.
Additionally, check out these sessions:
- Scaling Robot Learning Workshop featuring Dieter Fox, senior director of robotics research at NVIDIA.
- Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics Workshop and Structured Inductive Bias for Robot Learning featuring Garg.
- Accelerating Physics Simulators for Robotics Reinforcement Learning featuring Coumans.
- Bi-Manual Manipulation: Addressing Real-world Challenges featuring Claudia Pérez-D’Arpino, research scientist at NVIDIA.
- Representing and Manipulating Deformable Objects featuring Tucker Hermans, research scientist at NVIDIA.
- Robotics for Climate Change featuring Fabio Ramos, principal research scientist at NVIDIA.
- Computing for Robotics featuring Gerard Andrews, senior product marketing manager for robotics at NVIDIA.
Attend presentations on the papers above and visit NVIDIA exhibit booth 200 at ICRA to discover how these technologies are revolutionizing robotics and automation. Representatives from Connect Tech, an Elite member of the NVIDIA Partner Network, will be available at the booth to answer questions.
The NVIDIA robotics team is a part of NVIDIA Research, which comprises 300 researchers around the globe focused on topics spanning AI, computer graphics, computer vision and self-driving cars.



