How Open Models Are Driving AI Research
Every year, the International Conference on Machine Learning (ICML) reveals where thousands of AI researchers have decided to put their work. This year’s accepted papers reveal a clear direction: open...
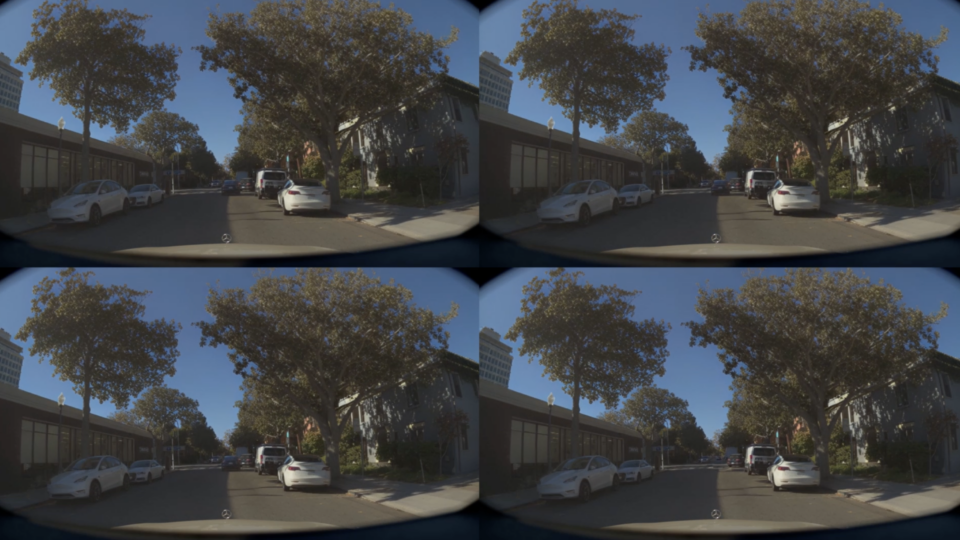
What makes a robot gripper useful isn’t that it can pick up one object — it’s that it can pick up the next one, and...
Every year, the International Conference on Machine Learning (ICML) reveals where thousands of AI researchers have decided to put their work. This year’s accepted papers reveal a clear direction: open...
This Spring Astronomy Day, here’s a look at how AI and GPUs are helping astronomers work through unprecedented volumes of cosmic data....

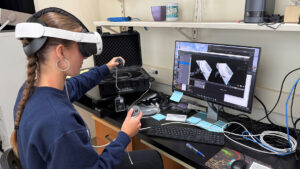
The next universal technology since the smartphone is on the horizon — and it may be a little less pocket friendly. The Moonshot research program, funded by the Japan Science...
The works of Plato state that when humans have an experience, some level of change occurs in their brain, which is powered by memory — specifically long-term memory. This change...

The Hao AI Lab research team at the University of California San Diego — at the forefront of pioneering AI model innovation — recently received an NVIDIA DGX B200 system...

For 25 years, the NVIDIA Graduate Fellowship Program has supported graduate students doing outstanding work relevant to NVIDIA technologies. Today, the program announced the latest awards of up to $60,000...

Researchers worldwide rely on open-source technologies as the foundation of their work. To equip the community with the latest advancements in digital and physical AI, NVIDIA is further expanding its...

Five finalists for the esteemed high-performance computing award have achieved breakthroughs in climate modeling, fluid simulation and more with the Alps, JUPITER and Perlmutter supercomputers — with two winners taking...

Tanya Berger-Wolf’s first computational biology project started as a bet with a colleague: that she could build an AI model capable of identifying individual zebras faster than a zoologist. She...

To power future technologies including liquid-cooled data centers, high-resolution digital displays and long-lasting batteries, scientists are searching for novel chemicals and materials optimized for factors like energy use, durability and...