

How Jaiveer Singh Is Helping Robots — and Developers — Move Faster
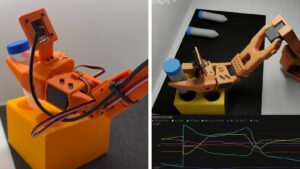
When Jaiveer Singh talks about robots, he doesn’t begin with spectacle. He begins with infrastructure: the boards inside machines, the software that lets developers see through a robot’s cameras and...