The digital era gave the advertising and marketing industry speed; the AI era is giving it autonomous operations.
For companies building next-generation technologies for advertising and marketing, the question is no longer whether to adopt AI but whether their infrastructure can support it at the speed and scale the industry demands.
At Cannes Lions, running June 22-26 in France, industry leaders including Alembic, Amazon Web Services (AWS), Criteo, Higgsfield, KERV.ai and Taboola are showcasing how NVIDIA technologies help unlock greater creativity and enable faster, autonomous operations at enterprise scale.
Decision Intelligence at Enterprise Scale
Causal AI platform Alembic helps solve one of enterprises’ biggest challenges: proving what marketing initiatives actually drive growth, not just reporting on what happened. Modeling true causation simultaneously across every channel, market and audience requires AI infrastructure that can process enormous, fast-changing datasets without reducing them to correlation-based assumptions.
NVIDIA DGX Vera Rubin NVL72 systems enable Alembic to scale its Causal AI models to analyze more variables, run larger simulations and quantify the true drivers of growth across marketing investments. Alembic will be the first Causal AI company to use NVIDIA DGX Vera Rubin SuperPODs for enterprise-scale causal modeling, giving executives a single source of unbiased truth on what drove business outcomes and where capital is being wasted, so they can act with confidence on future decisions.
Alembic’s inference runs on private supercomputing infrastructure inside Equinix data centers where the enterprise data already lives, keeping AI workloads local. World Wide Technology extends this to secure and regulated environments. Together, the companies offer a complete enterprise AI stack purpose-built for executives and data leaders accountable for capital decisions.
Smarter Bidding at Auction Speed
For advertisers, serving ads and relevant recommendations across billions of daily transactions requires AI that’s accurate, fast and affordable enough to run at scale.
Amazon Web Services (AWS) is bringing cloud infrastructure, foundation models and NVIDIA GPU-accelerated computing together into a cohesive stack for the adtech industry that can scale for the era of AI agents. AWS is giving advertisers and demand-side platforms, supply-side platforms and independent software vendors a production-ready reference implementation to run AI-powered bidding directly inside auctions — powered by NVIDIA Triton Inference Server, which delivers deep learning inference fast enough to fit within real-time auction windows.
That means adtech companies can move from rules-based decisioning to AI-powered models for bid price optimization, audience activation and deal scoring directly within the live auction pipeline.
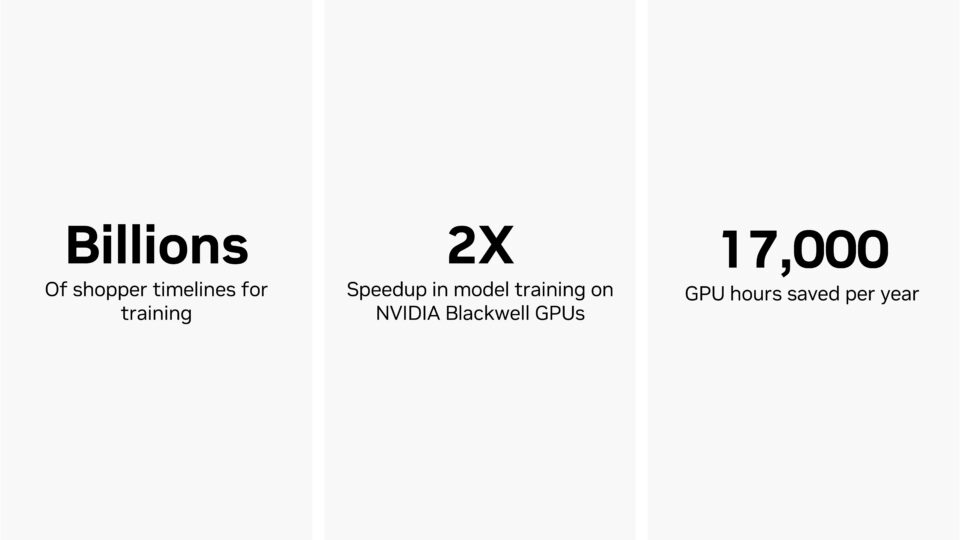
Advertising company Criteo helps retailers show the right product to the right shopper at the right moment, across one of the largest recommendation networks in digital advertising. Keeping those recommendations relevant means continuously retraining its AI on billions of shopper timelines, a process where speed directly translates to quality.
Collaborating with NVIDIA, Criteo achieved a roughly 2x speedup in model training on NVIDIA Blackwell GPUs, driven by the NVIDIA cuEmbed open library. That efficiency already frees roughly 17,000 GPU hours a year, and the companies are now scaling the work further.
Taboola is applying the same infrastructure logic to conversational AI, using NVIDIA GPUs to power DeeperDive, its AI answer engine, and extending that infrastructure to AI platforms and chatbots so they can generate revenue from advertising.
Agentic AI Across the Marketing Workflow
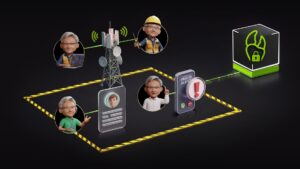
In marketing and other industries, AI agents are increasingly acting as digital coworkers, taking on long-running tasks across planning, execution and optimization. But these agents are only deployable for enterprises when they come with proper controls, including safety guardrails, auditability and role-based permissioning.
The NVIDIA Agent Toolkit, which includes NVIDIA NemoClaw blueprints and the NVIDIA OpenShell secure runtime, provides these controls.
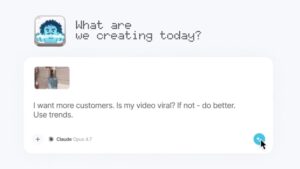
For example, Higgsfield AI, an AI video and image generator production platform, offers Higgsfield Supercomputer agents that manage the full marketing automation lifecycle: from campaign ideation, planning, creative production to posting and autonomous campaign optimization — in a single interface. It orchestrates leading large language models alongside 35+ image, audio and video models, including Higgsfield’s proprietary Soul and Soul 2.0 models built on NVIDIA Blackwell architecture.
As part of the collaboration, NVIDIA Agent Toolkit software, including NVIDIA Nemotron open models, powers specialized subagents within the Higgsfield Supercomputer, running continuously inside every campaign. NemoClaw and OpenShell are being integrated to provide the enterprise trust layer.
The result: the full marketing lifecycle, from ideation and creative production through posting, performance analysis and optimization, is available in a single interface. Marketing campaigns for nearly 400 of the Fortune 500 companies are created on the platform.
Video courtesy of Higgsfield.
Contextual and Content Intelligence at Scale
AI understanding content at the level of meaning requires advanced infrastructure. NVIDIA’s multimodal stack provides the vector search, data processing and video understanding capabilities that make this kind of intelligence viable at production scale.
AI-powered media leader KERV’s Moment Match Engine evaluates a multitude of signals across every video frame and media asset to understand individual scenes, objects and products, providing content recommendations based on ad creative — the visual and textual elements of an advertisement — to drive improved engagement.
Video courtesy of KERV.ai.
KERV.ai recently optimized its processing pipeline, achieving over 10x improvements in speed and efficiency when using the NVIDIA Nemotron 3 Nano Omni open model in the platform. KERV’s solution analyzes what each ad or media brief contains, who it resonates with and which exact moment within content environments to target.
On MediaPerf, an open benchmark for AI video understanding, Nemotron 3 Nano Omni — adopted by ecosystem partners including PYLER, which uses NVIDIA DGX B200 systems — delivered the highest throughput and lowest inference cost of any model evaluated, open or closed source.
Learn more about how NVIDIA powers advertising and marketing technologies.
Featured video courtesy of Higgsfield.