Editor’s note: This post is part of Into the Omniverse, a series focused on how developers, 3D practitioners and enterprises can transform their workflows using the latest advances in OpenUSD and NVIDIA Omniverse.
Humanoid robots are rapidly becoming a reality. Those built on NVIDIA Isaac GR00T are already learning to walk, manipulate objects and otherwise interact with the real world.
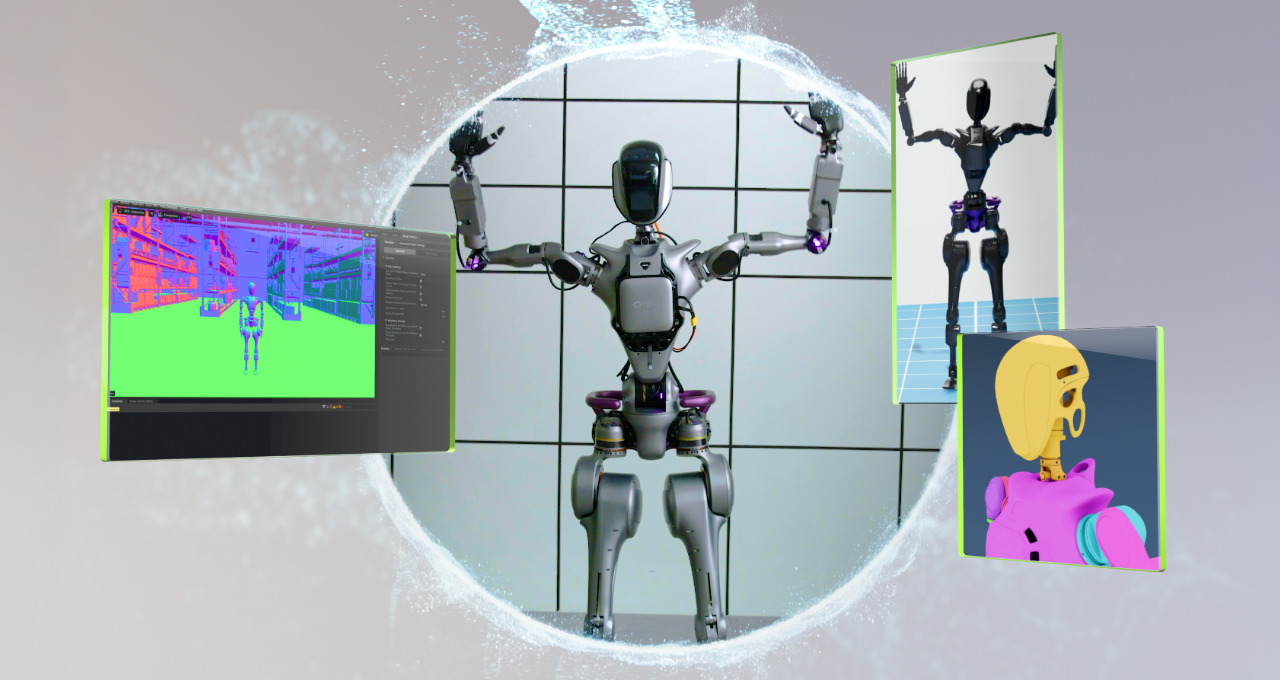
Gathering diverse and large datasets to train these sophisticated machines can be time-consuming and costly. Using synthetic data (SDG), generated from physically-accurate digital twins, researchers and developers can train and validate their AI models in simulation before deployment in the real world.
Universal Scene Description, aka OpenUSD, is a powerful framework that makes it easy to build these physically accurate virtual environments. Once 3D environments are built, OpenUSD allows teams to develop detailed, scalable simulations along with lifelike scenarios where robots can practice, learn and improve their skills.
This synthetic data is essential for humanoid robots to learn humanlike behaviors such as walking, grasping objects and navigating complex environments. OpenUSD is enhancing the development of humanoid robots and paving the way for a future where these machines can seamlessly integrate into people’s daily lives.
The NVIDIA Omniverse platform, powered by OpenUSD, provides developers a way to unify 3D assets from disparate sources such as 3DCAD and digital content creation (DCC) tools. This allows them to build large-scale 3D virtual environments and run complex simulations to train their robots, streamlining the entire process and delivering faster, more cost-effective ways to collaborate and develop physical AI.
Advancing Robot Training With Synthetic Motion Data
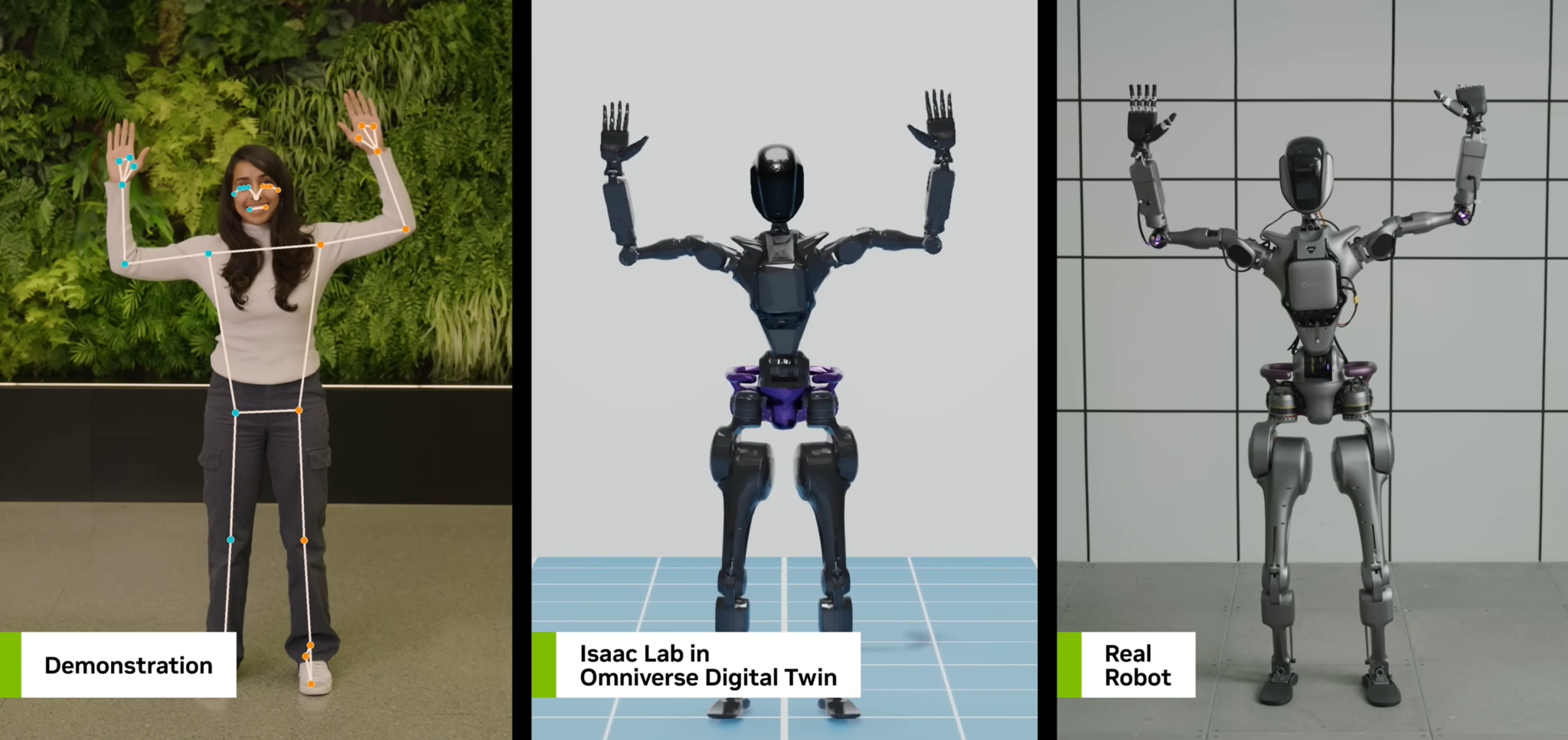
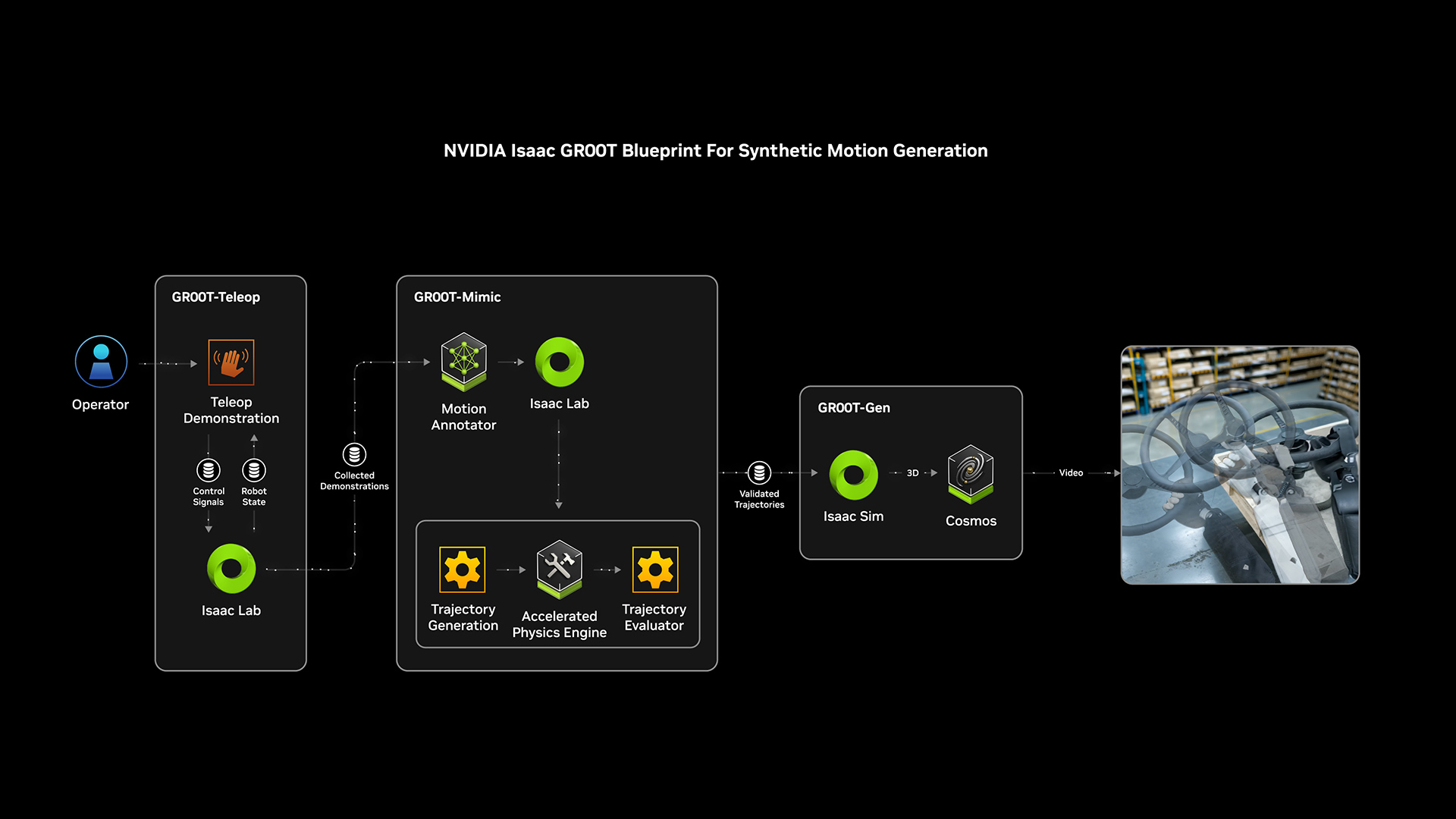
At CES last month, NVIDIA announced the Isaac GR00T Blueprint for synthetic motion generation to help developers generate exponentially larger synthetic motion datasets to train humanoids using imitation learning.
Highlights of the release include:
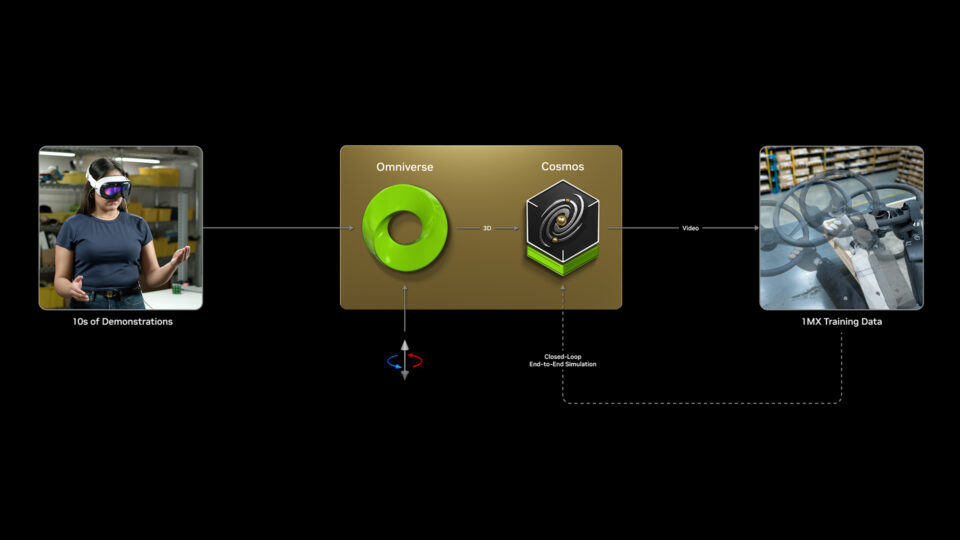
- Large-Scale Motion Data Generation: Uses simulation as well generative AI techniques to generate exponentially large and diverse datasets of humanlike movements, speeding up the data collection process.
- Faster Data Augmentation: NVIDIA Cosmos world foundation models generate photorealistic videos at scale using the ground-truth simulation from Omniverse. This equips developers to augment synthetic datasets faster, for training physical AI models, reducing the simulation-to-real gap.
- Simulation-First Training: Instead of relying solely on real-world testing, developers can train robots in virtual environments, making the process faster and more cost-effective.
- Bridging Virtual to Reality: The combination of real and synthetic data along with simulation-based training and testing allows developers to transfer the robots skills learned in the virtual world to the real-world seamlessly.
Simulating the Future of Robotics
Humanoid robots are enhancing efficiency, safety and adaptability across industries like manufacturing, warehouse and logistics, and healthcare by automating complex tasks and increasing safety conditions for human workers.
Major robotics companies including Boston Dynamics and Figure have already started adopting and demonstrating results with Isaac GR00T.
Scaled Foundations is lowering the barrier to robotics development across all form factors, from robotics ARMs to humanoids. The company’s Open GRID Platform, which has NVIDIA Isaac Sim integrations, provides developers a simplified way to simulate robots through an easy-to-use, browser-based development environment.
Get Plugged Into the World of OpenUSD
Learn more about OpenUSD, humanoid robots and the latest AI advancements at NVIDIA GTC, a global AI conference running March 17-21 in San Jose, California.
Don’t miss NVIDIA founder and CEO Jensen Huang’s GTC keynote on Tuesday, March 18 — in person at the SAP Center or online. He’ll share the latest technologies driving the next wave in AI, digital twins, cloud technologies and sustainable computing.
The inaugural GTC Humanoid Developer Day will take place on Wednesday, March 18. Following the sessions, join the Physical AI Developer Meetup to network with developers and researchers at NVIDIA GTC. Discuss the latest breakthroughs in OpenUSD and generative AI-powered simulation and digital twins, as well as innovations in generalist robotics for the next frontier of industries.
Learn how to use USD and continue to optimize 3D workflows with the new self-paced “Learn OpenUSD” curriculum for 3D developers and practitioners, available for free through the NVIDIA Deep Learning Institute. For more resources on OpenUSD, explore the Alliance for OpenUSD forum and the AOUSD website.
Stay up to date by subscribing to NVIDIA news, joining the community and following NVIDIA Omniverse on Instagram, LinkedIn, Medium and X.
Featured image courtesy of Fourier.